






服务热线
0769-28680919
153-2293-3971

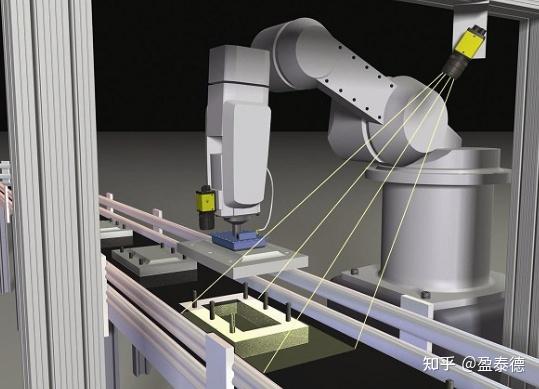
机器人3D引导抓取的工作流程主要涉及以下几个步骤:
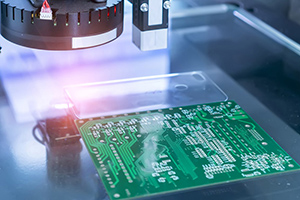
图像采集:
使用3D相机(如Mech-Eye工业级3D相机)采集物体的图像与位置信息。
视觉处理:
工控机上运行的梅卡曼德软件基于相机采集的图像和位置信息进行视觉处理,输出物体的位置、姿态以及规划的机器人的运动路径。
手眼标定:
确定相机坐标系与机械手末端坐标系之间的空间关系,即手眼标定。这涉及到求解从相机坐标系到机械手坐标系的变换矩阵,以便将视觉系统识别的物体位置转换为机械手坐标系下的位置。
路径规划:
Mech-Vision机器视觉软件支持对视觉结果进行简单的路径规划,并输出机器人的抓取路径。
接口通信:
机器人侧和视觉系统采用同一标准通信协议进行通信,由机器人侧发送请求,视觉系统处理后返回响应(目标物体的位姿和标签信息)。
抓取执行:
机器人根据视觉系统返回的响应做进一步决策或执行相应的任务,如抓取物体。
实时调整:
机器人在执行过程中,可以根据3D视觉系统提供的实时反馈信息进行调整,以应对零部件的位置偏差或装配错误。
应用案例:
在汽车行业,3D视觉引导技术被用于实现汽车零部件的上下料操作,通过分析3D模型和实际场景的匹配程度,确定零部件的位置和姿态,使机器人能够精确地抓取和放置零部件。
柔性化生产:
3D视觉引导技术能够适应小批量多品种的生产需求,提供更大的灵活性和自适应性,同时带来更高的精确性、可靠性和效率。
通过上述步骤,机器人3D引导抓取系统能够实现对无序堆放的物体进行精准识别、定位和抓取,极大地提高了生产效率和灵活性
 官方公众号
官方公众号 官方抖音号
官方抖音号Copyright © 2022 东莞康耐德智能控制有限公司版权所有.机器视觉系统 粤ICP备2022020204号-1 联系我们 | 网站地图
