






服务热线
0769-28680919
153-2293-3971

2.5D工业相机和3D工业相机在机器视觉缺陷检测上的主要区别体现在以下几个方面:
深度信息获取:
2.5D工业相机:通过拍摄物体表面并进行深度信息处理,获得物体表面的三维信息,但并不像3D工业相机那样捕捉全方位的立体信息。2.5D工业相机在拍摄图像后,通过算法解析出高度图,形成一个接近三维的视觉效果。
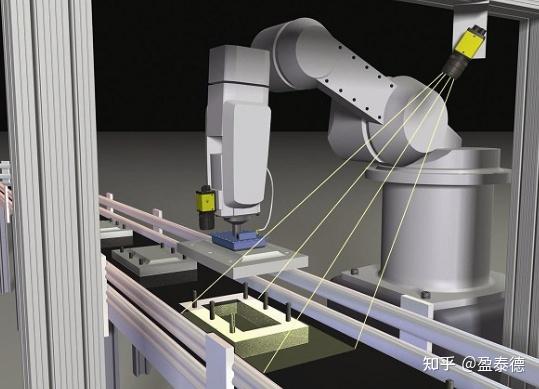
3D工业相机:能够真实捕捉物体的立体形状,通过双目视觉、激光扫描等技术,实现全面的三维测量,提供物体的立体形状、深度、立体位置和纹理等信息。
视角和信息完整性:
2.5D工业相机:通常是单视角,信息比较残缺,很多算法最终都会回归到2D算法上。
3D工业相机:需要多个视角记录对象的数据,从每个角度分析深度信息,将这些信息结合后,可以精确绘制出物体的三维模型。
应用场景和功能:
2.5D工业相机:在表面缺陷检测上表现优异,适合实时检测,成本相对低廉,更适合中小型企业。
3D工业相机:能够捕捉高度详细的三维数据,广泛应用于机器人导航和自动化工厂,适应性较强,可以应对复杂场景。
技术实现和算法:
2.5D工业相机:增加了深度信息,与3D相比,2.5D图像又并非通过点云,而是通过颜色传递高度信息。
3D工业相机:常用的技术包括深度估计、点云处理、三维重建等,通过分析和处理深度图或点云数据得到。
成本和处理速度:
2.5D工业相机:成本相对较低,处理速度较快,适合快速检测表面质量的情况。
3D工业相机:成本高,需要专业技术人员进行操作维护,相对较慢的处理速度,可能影响实时性。
总结来说,2.5D工业相机在某些机器视觉应用场景下可以作为一个成本效益较高的解决方案,特别是在机器视觉表面缺陷检测方面。而3D工业相机则提供了更为全面和精确的三维信息,适合于需要高精度和复杂场景应用的场合。
 官方公众号
官方公众号 官方抖音号
官方抖音号Copyright © 2022 东莞康耐德智能控制有限公司版权所有.机器视觉系统 粤ICP备2022020204号-1 联系我们 | 网站地图
