





服务热线
0769-28680919
153-2293-3971 / 177-0769-6579

1. 滤波处理:边缘检测算法的核心在于利用图像强度的一阶和二阶导数。然而,这些导数计算容易受到噪声的干扰,因此滤波器的使用变得尤为关键,它有助于优化边缘检测器在噪声环境下的表现。但值得注意的是,滤波过程虽能降低噪声,却也可能造成边缘强度的损失,这需要在增强边缘与降低噪声之间取得平衡。
2. 边缘增强:为了凸显图像中边缘的存在,我们需要确定各点邻域强度的变化值。增强算法通过计算梯度幅值,有效地将那些有显著强度变化的点突显出来。
3. 边缘检测:虽然图像中许多点的梯度幅值较大,但在实际应用中,这些点并不都代表真正的边缘。因此,我们需要采用特定的方法来筛选并确定哪些点是真正的边缘点。最简单且常用的方法便是设定一个梯度幅值阈值。
4. 边缘定位:在某些应用场景中,我们不仅需要知道边缘的存在,还需要精确地确定其位置和方向。这可以通过子像素分辨率的估计来实现。
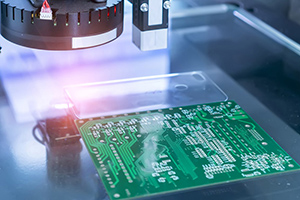
机器视觉与边缘检测:边缘检测是机器视觉检测的核心技术之一。在实际应用中,前三步往往足够使用,因为它们能告诉我们边缘的大致位置,而无需知道其精确的方向或位置。边缘检测的本质在于利用特定算法识别图像中对象与背景之间的界限。这种界限通常表现为灰度值发生剧烈变化的区域。我们可以通过分析图像灰度的梯度变化来检测这些边缘。传统的边缘检测方法通常通过构建边缘检测算子来识别像素点周围的边缘。
边缘检测的应用:边缘检测技术在多个领域都有广泛应用,如芯片针脚的规则性检测、目标定位以及缺陷识别等。它为高精度测量和质量控制提供了强大的技术支持。如果您的生产线需要引入机器视觉或AI深度学习技术来提升质量控制水平,我们康耐德智能可以为您提供专业的解决方案。我们会先根据您的具体需求进行需求分析,然后为您设计一个合适的方案。
 晶圆刻蚀残留机器视觉检测系统
2026-05-03
晶圆刻蚀残留机器视觉检测系统
2026-05-03
晶圆刻蚀残留检测是半导体制造良率控制的关键环节。由于刻蚀残留缺陷(如未刻透的氧化层、金属残留、聚合物残留)尺寸极小(纳米至微米级),且背景纹理复杂,传统的基于规则或简单模板匹配的机器视觉系统往往难以胜任。
 晶圆显影缺陷机器视觉检测系统
2026-05-03
晶圆显影缺陷机器视觉检测系统
2026-05-03
晶圆显影缺陷机器视觉检测系统主要用于显影后检查(ADI, After Develop Inspection),这是光刻工艺中的关键质量控制环节。该系统能够在显影工序完成后,自动检测光刻胶图形的缺陷,包括显影不完全、残留、桥接、缺失图案等问题。
 康耐德智能显示模组玻璃破片视觉检测系统
2026-05-03
康耐德智能显示模组玻璃破片视觉检测系统
2026-05-03
显示模组作为现代电子设备的核心显示单元,广泛应用于消费电子、车载显示、工业控制、医疗设备、智能穿戴等领域,而玻璃作为显示模组的核心承载部件(包括盖板玻璃、Cell玻璃、触控玻璃等),其完整性直接决定显示效果、触控性能与产品使用寿命。
 输液瓶液位高度机器视觉检测系统
2026-04-24
输液瓶液位高度机器视觉检测系统
2026-04-24
输液瓶(通常为玻璃或聚丙烯材质,透明或半透明)液位的检测,主要难点在于液体透明、反光、以及液体与空气的分界线(月牙面)特征不明显。
 官方公众号
官方公众号 官方抖音号
官方抖音号Copyright © 2022 东莞康耐德智能控制有限公司版权所有.机器视觉系统 粤ICP备2022020204号-1 联系我们 | 网站地图
