





服务热线
0769-28680919
153-2293-3971

机器视觉定位与引导系统方案是工业自动化领域中的一项关键技术,它结合了机器视觉和机器人技术,以实现精确的定位和引导操作。这些系统广泛应用于制造业,特别是在需要精确抓取、组装、定位和检测的场景中。以下是一些常见的机器视觉定位与引导系统方案:
1. 单相机抓取定位引导:
- 在这种方案中,一个相机被用来捕捉传送带上的物料图像。
- 机器视觉系统分析图像,确定物料的位置和方向。
- 机器人根据视觉系统提供的位置信息进行精确抓取。
2. 单相机纠偏引导:
- 适用于需要对放置或抓取的物料进行位置校正的场景。
- 相机捕捉物料图像,并通过视觉系统分析其偏差。
- 机器人根据分析结果进行调整,以确保物料正确放置或抓取。
3. 上下相机贴合定位引导:
- 这种方案通常用于需要精确对位的场景,如3C产品屏幕和电路板的贴合。
- 上下两个相机分别捕捉不同视角的图像,以提高定位精度。
- 视觉系统分析上下图像,指导机器人进行精确贴合。
4. 手眼标定:
- 手眼标定是机器视觉与机器人结合应用的核心,它解决了相机(眼)与机械手(手)之间的坐标转换关系。
- 通过标定,确保机械手能够根据相机的定位信息精确抓取目标。
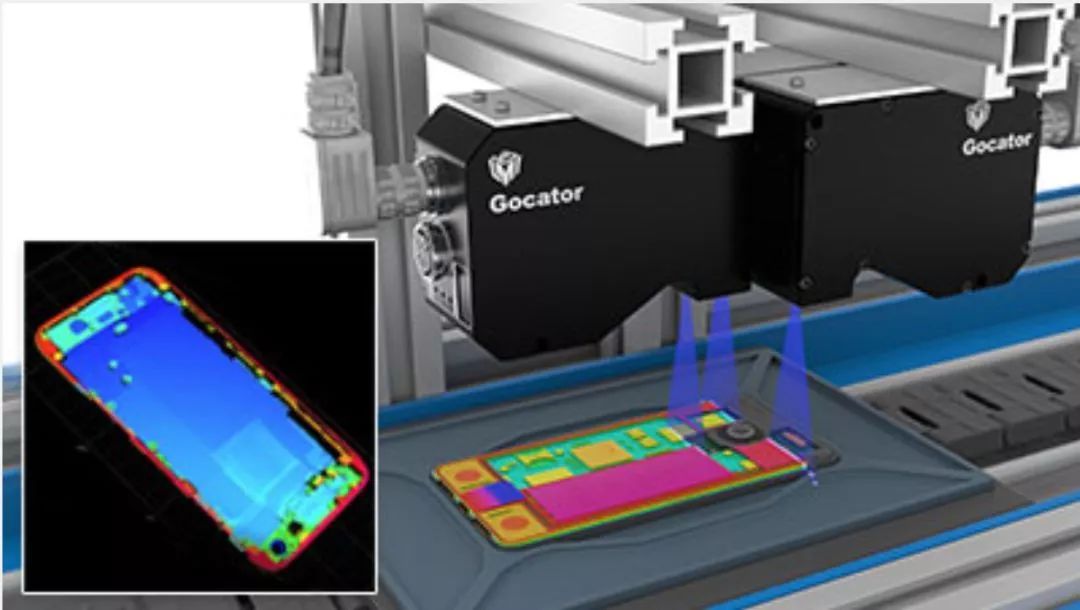
5. 多相机系统:
- 在一些复杂的应用场景中,可能需要多个相机来覆盖更大的视野或提供更多的视角。
- 多相机系统可以提供更全面的视觉信息,帮助机器人在三维空间中进行精确操作。
6. 与机器人的通信集成:
- 机器视觉系统需要与机器人控制系统无缝集成,以实现实时的定位引导。
- 常见的通信协议包括TCP/IP、串行通信、以太网等。
7. 软件平台支持:
- 强大的视觉软件平台,如康耐德智能的工业视觉系统,提供了丰富的视觉工具和手眼标定功能。
- 软件平台支持多种标定方法,如九点标定和十二点标定,以及多种对位方式。
这些方案的实施可以显著提高生产效率、减少人工操作、提升产品质量,并适应快速变化的生产需求。随着技术的进步,机器视觉定位与引导系统将继续发展,提供更多的功能和更高的精度。
 机器视觉系统为工业发展带来了什么?
2024-11-17
机器视觉系统为工业发展带来了什么?
2024-11-17
机器视觉技术为工业发展带来了革命性的变化,它通过模拟人眼的功能,使得机器能够自动接收和处理图像,以获得所需信息或用于控制机器人运动。以下是机器视觉为工业发展带来的几个主要影响:
 机器视觉系统技术在高精密加工领域的作用
2024-11-14
机器视觉系统技术在高精密加工领域的作用
2024-11-14
在高精密加工过程中,机器视觉技术主要扮演了检测与控制的双重角色。一方面,通过高精度的图像捕捉和处理,机器视觉技术能够实现对加工工件的微米甚至纳米级检测。一方面,通过高精度的图像捕捉和处理,机器视觉技术能够实现对加工工件的微米甚至纳米级检测。
 机器视觉系统在流水线零件正反面识别与定位中的应用
2024-11-14
机器视觉系统在流水线零件正反面识别与定位中的应用
2024-11-14
在现代自动化流水线生产中,机器视觉系统正发挥着越来越重要的作用,特别是在零件正反面识别与定位方面。这一技术的应用,不仅极大地提高了生产效率,还确保了产品质量的稳定性。
 基于机器视觉的表面缺陷检测面临的问题与难点剖析
2024-11-10
基于机器视觉的表面缺陷检测面临的问题与难点剖析
2024-11-10
基于机器视觉的表面缺陷检测系统虽然已经在多个领域取得了显著成果,但仍面临一系列问题和难点,尤其是在线检测环境中。
 官方公众号
官方公众号 官方抖音号
官方抖音号Copyright © 2022 东莞康耐德智能控制有限公司版权所有.机器视觉系统 粤ICP备2022020204号-1 联系我们 | 网站地图
