





服务热线
0769-28680919
153-2293-3971

着全球制造业行业市场的竞争日趋激烈,公司企业需保障以最大效率运营变得非常重要的。由于全过程有关问题导致的停机时间被视为是非增值停机时间,严重影响企业的获利能力。机器视觉可以说是前沿领域,如果设定合理,能够减少全过程效率不高。一切采用机器视觉系统作为机器人系统引导或检测的设施都应该重视这个领域,以寻求潜在的改善。在机器视觉系统中要是没有合理的设定,可能会致使机器视觉系统全过程停机,下面就是特别应注意提升的十个方面:

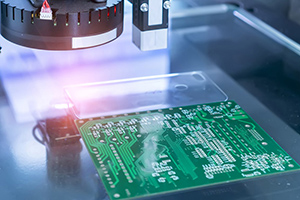
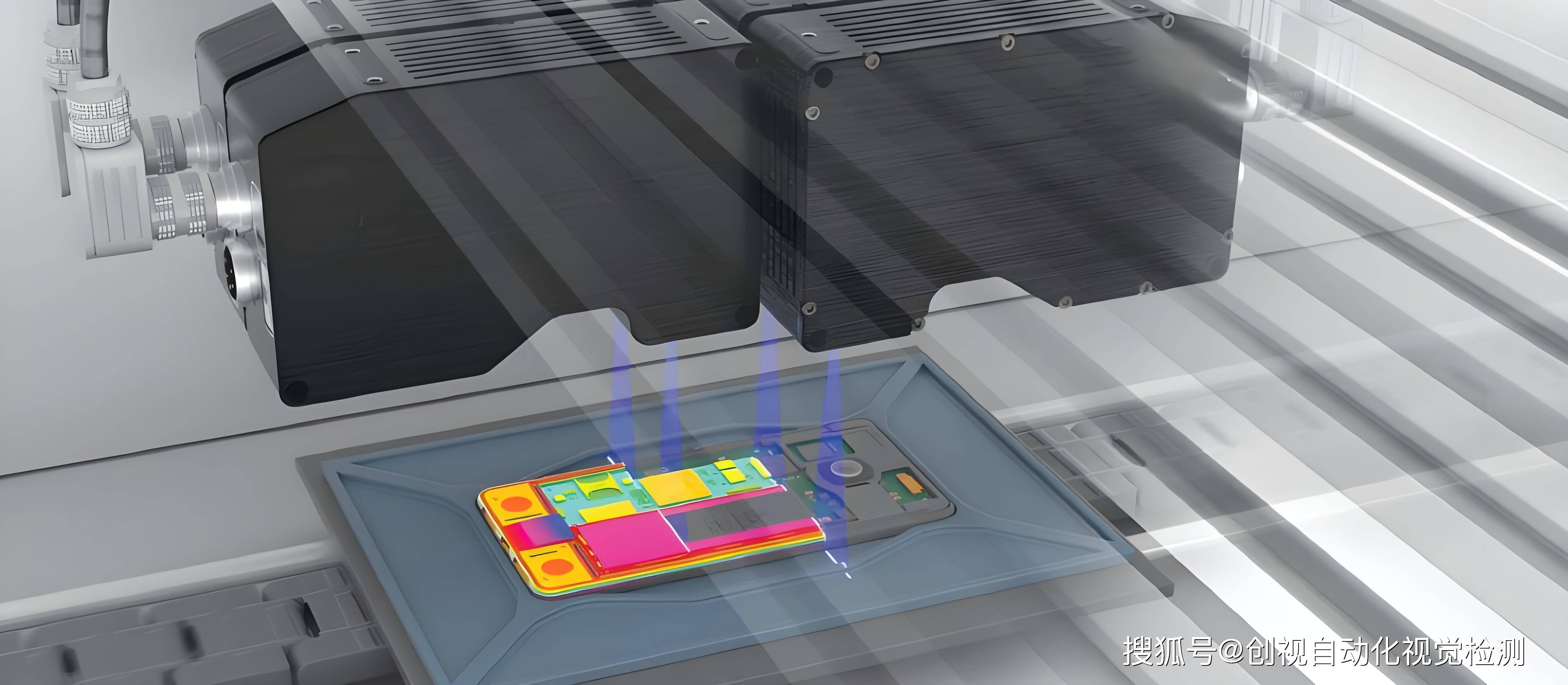
1)照明灯具工艺-恰当的照明灯具工艺应当用来点亮必须检测的范围。背光、亮场、掠射、低角度线性阵列和暗场等光照技术是机器视觉系统鲁棒性最重要的方面。依据零部件表面光洁度和轮廓,恰当的照明灯具工艺可以提高缺陷或去除图像噪声,提升系统的效率和可靠性。这么做的目的是为了选择一个能够产生最大对比度(从黑色到白色像素)的光照工艺。此外,对比度需要和正在测量或检测的内容紧密相关。
2)照明灯具颜色-应注意每一个指定部分或运用所使用的灯光颜色。频率是每秒振荡的次数,而波长是波在同一个位置上两点之间的距离。每种不同的紫外线、蓝、绿、黄、红、红外光谱都是不一样的照明灯具频率和波长。这些现象会影响到物体和相机的表面在光线进入时的反应。主要目的是运用能够产生最大对比度和解决图像中噪声的光频率。例如,金属零件有时能够被加入到一个系统中,该系统覆盖着薄薄的油或表面轻微氧化,主要取决于它们是怎样存储的。当这两种类型的零部件都被加入检查系统时,采用光的频率来减少波动量是十分重要的。

3)采用滤光片滤光片,解决背景和架空照明灯具噪声等严重的环境干扰。借助简单地在相机镜头上摆放一个与点亮该部件的光的频率相匹配的滤波器,可以解决环境照明灯具干扰。
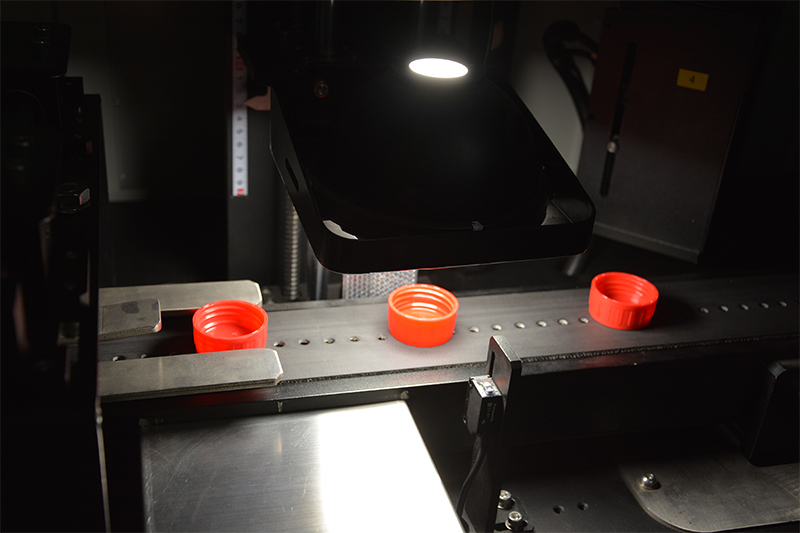
4)镜头-视场(FOV)和感兴趣区域(ROI),包括所需的像素精度,起着很大的作用。恰当的焦距镜头将影响机器视觉系统所能看到的范围的大小,并最后决定所收集的所有信息。计算太大的FOV可能造成较少的细节和准确性,而计算过小FOV可能造成检查不成功,由于部分或对象在摄像机的视线之外。在计算FOV时,更重要的是在决定哪个焦距镜头比较适合运用前,先了解零部件或物体的最大ROI和该区域的最大可接受误差。有时这些原因也许会受到相机到物体的工作距离或高度条件的限制,所以在构建系统前应该考虑所有这些因素。
5)定位——更重要的是要了解部件或应用程序的公差太宽,禁止对部件进行重复检测。当一个部件移出相机视野时,会造成系统不稳定。应当采用某种类型的物理夹具来限定物体或 部分的运动。如果零部件移出相机视图,就会出现故障,增加不必要的停机时间。通过提供零件的大概位置,能够清除这种不稳定性,保证零件总能重复呈现在机器视觉系统中。
6)校正-具有母版工装夹具或校正程序,可对系统配置进行适当校正,以确保符合设备的产品质量标准。
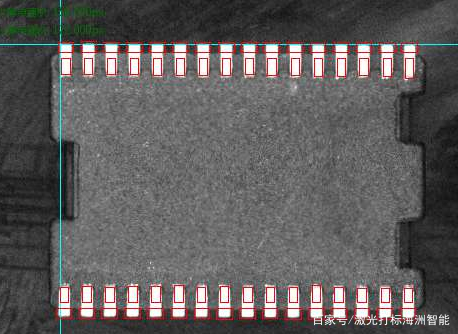
7)特征和基准——为了能准确地检测图像,基准——在每次检测中出现的唯一特征——能够在检查时用作机器视觉系统工具的参考点,或者用于检测源图像存不存在正确的部分。
8)像素-像素决定了机器视觉系统的可重复性;它容许将像素的大小量化为测量值。确认系统的像素很重要,由于其决定了检测的准确性和可重复性。尤其是在质量测量检测和机器人引导方面应该考虑的解决方案。一些软件可以提高分辨率,精度可以达到亚像素。
9)稳定性——在设定机器视觉传感器时,最重要的是为了保护摄像系统和灯光不会受到移动的干扰。这样的项目是系统软件校正的目标。为了能尽量避免移动或干扰,明智的做法是将摄像机和照明灯安装在震动小或没有震动和干扰的地方。
10)测试——定期对系统配置进行检查,确认缺陷部件是否被系统软件捕捉和拒绝。能够在系统中直接建立一个测试过程,以优化该过程。有瑕疵的测试零部件能够在任何时候放置到系统中,以验证系统的适当功能。
 选择机器视觉检测设备定制厂家需要考虑哪些方面?
2024-11-23
选择机器视觉检测设备定制厂家需要考虑哪些方面?
2024-11-23
选择机器视觉检测设备定制厂家时,您需要考虑以下几个关键因素
 机器视觉能够对IC芯片进行哪些方面检测?
2024-11-23
机器视觉能够对IC芯片进行哪些方面检测?
2024-11-23
机器视觉技术在IC芯片检测中可以应用于多个方面
 康耐德机器视觉可以检测锂电池哪些方面?
2024-11-23
康耐德机器视觉可以检测锂电池哪些方面?
2024-11-23
随着新能源行业的快速发展,锂电池作为核心组件,其生产质量受到了前所未有的关注。在锂电极片的生产过程中,机器视觉系统以其高精度、高效率的特点,成为了保障锂电极片质量的关键工具。那么康耐德机器视觉系统在锂电极片生产中可以检测哪些关键指标?
 机器视觉系统为工业发展带来了什么?
2024-11-17
机器视觉系统为工业发展带来了什么?
2024-11-17
机器视觉技术为工业发展带来了革命性的变化,它通过模拟人眼的功能,使得机器能够自动接收和处理图像,以获得所需信息或用于控制机器人运动。以下是机器视觉为工业发展带来的几个主要影响:
 官方公众号
官方公众号 官方抖音号
官方抖音号Copyright © 2022 东莞康耐德智能控制有限公司版权所有.机器视觉系统 粤ICP备2022020204号-1 联系我们 | 网站地图
